The Team

In my freshman year of college, I learned about Mech Warfare robots while attending Robogames 2017 with my friend. Compared to the flashy battle bots, I was more intrigued by the spider-like robots crawling about in a mini cityscape, shooting other robots whilst being controlled remotely from a camera vid. They looked so cute! I decided I wanted to build one as well. Except, robots are pretty expensive, and I was just a poor college student. So, I looped a few others in and formed a team under Cal Poly Robotics Club. If we ever need to build giant walking combat machines some day, we'll be ready.
The Robot
Design
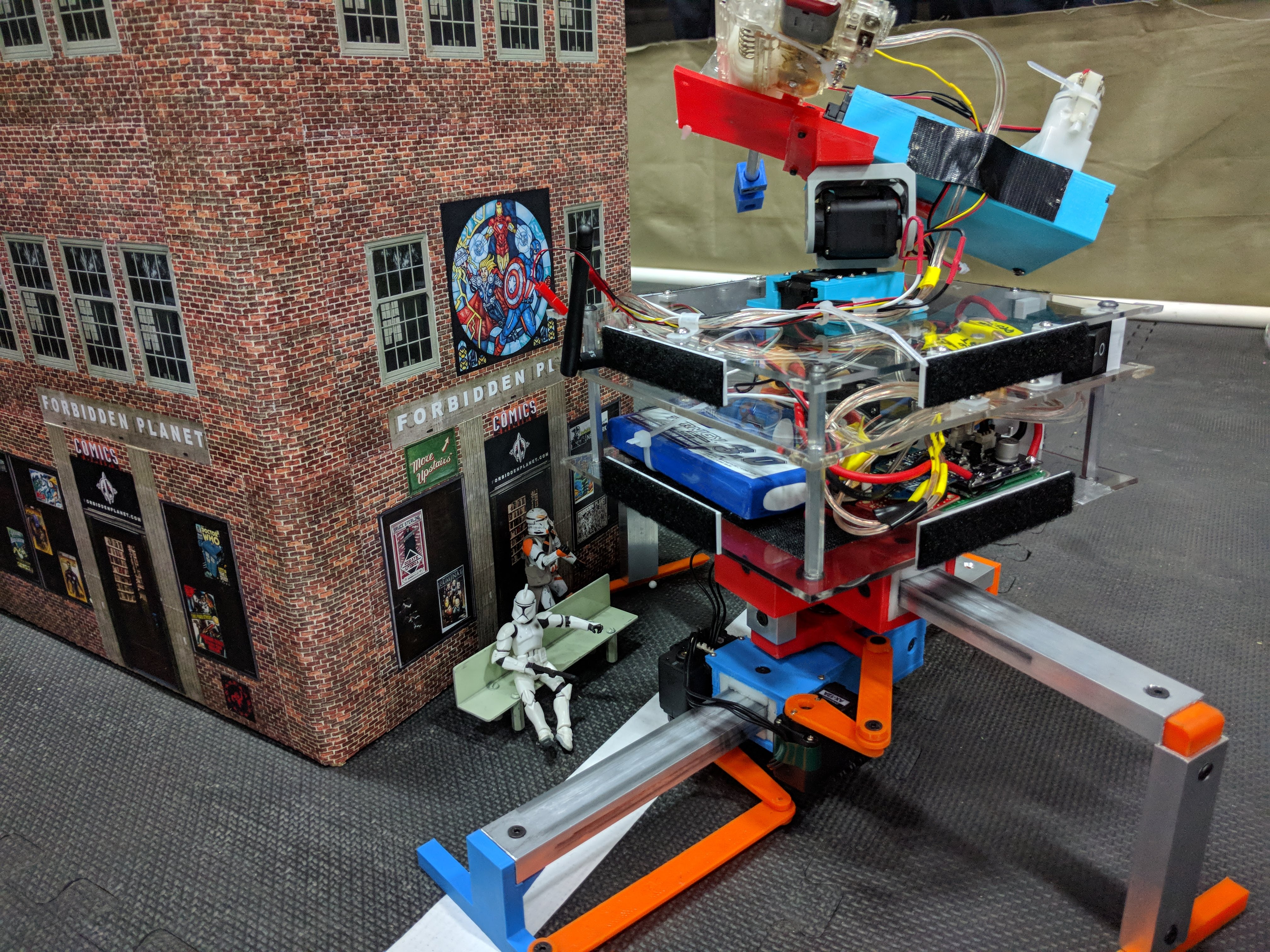
The rules in Mech Warfare mandate that the robot may not be actuated by wheels or similar mechanisms (so no tanks either). Quadrupeds with spider-like movements are a popular choice among Mech Warfare competitors for their agility, but such designs require a lot of servos (read: expensive). So, our team decided to go with a novel sliding mechanism instead. The "legs" slide forwards and backwards using levers actuated by servos, allowing the robot to travel in a grid-like pattern. The "legs" can also rotate about the z-axis to change the robot's direction of movement.
Competition
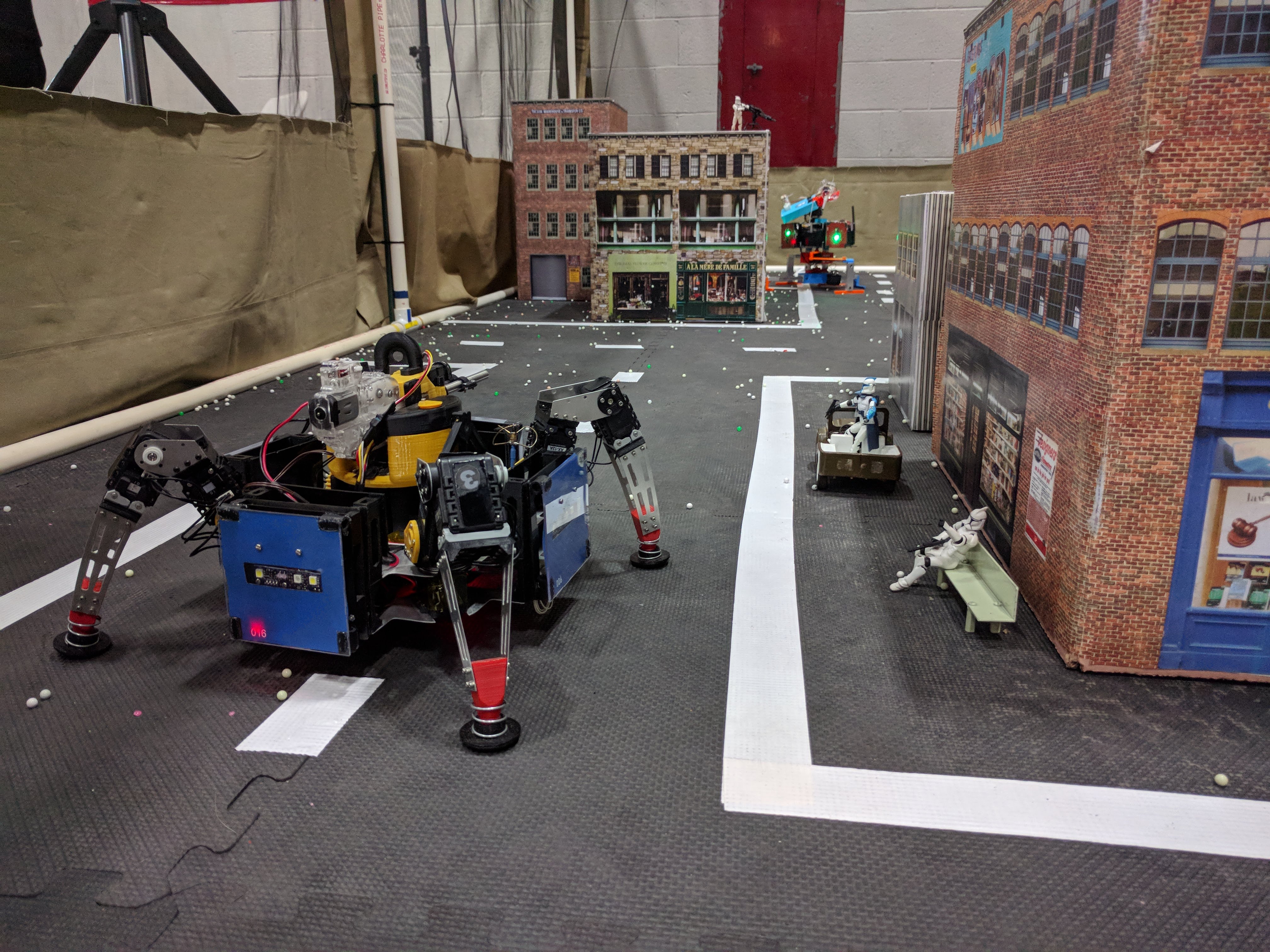
We brought our robot to the Robogames 2018 Mech Warfare competition, where we played against some veterans (who host the event) and two other college teams. By luck of the bracketing system, we were able to advance pretty far forward, beating the other college teams and placing third! Overall, it was a very fun experience, from debugging the robot in the hotel room to hot swapping components between matches. Big shoutout to the veterans for helping us out and lending us parts so we could have fun at the competition!